Les robots actuels sont certes capables de réaliser des tâches complexes, mais ils sont souvent limités par leurs mouvements mécaniques et rigides. La raison principale de cette rigidité réside dans leur structure interne composée de matériaux durs comme de la fibre de carbone et des tubes métalliques.
Des mouvements plus souples pour les mains des robots
Robert Katzschmann, professeur de robotique à l’ETH Zurich, explique dans un article publié dans Nature que ces structures permettent certes aux robots d’effectuer des mouvements et de saisir des objets, mais leur absence de flexibilité les rend moins agiles et souples que le corps humain.
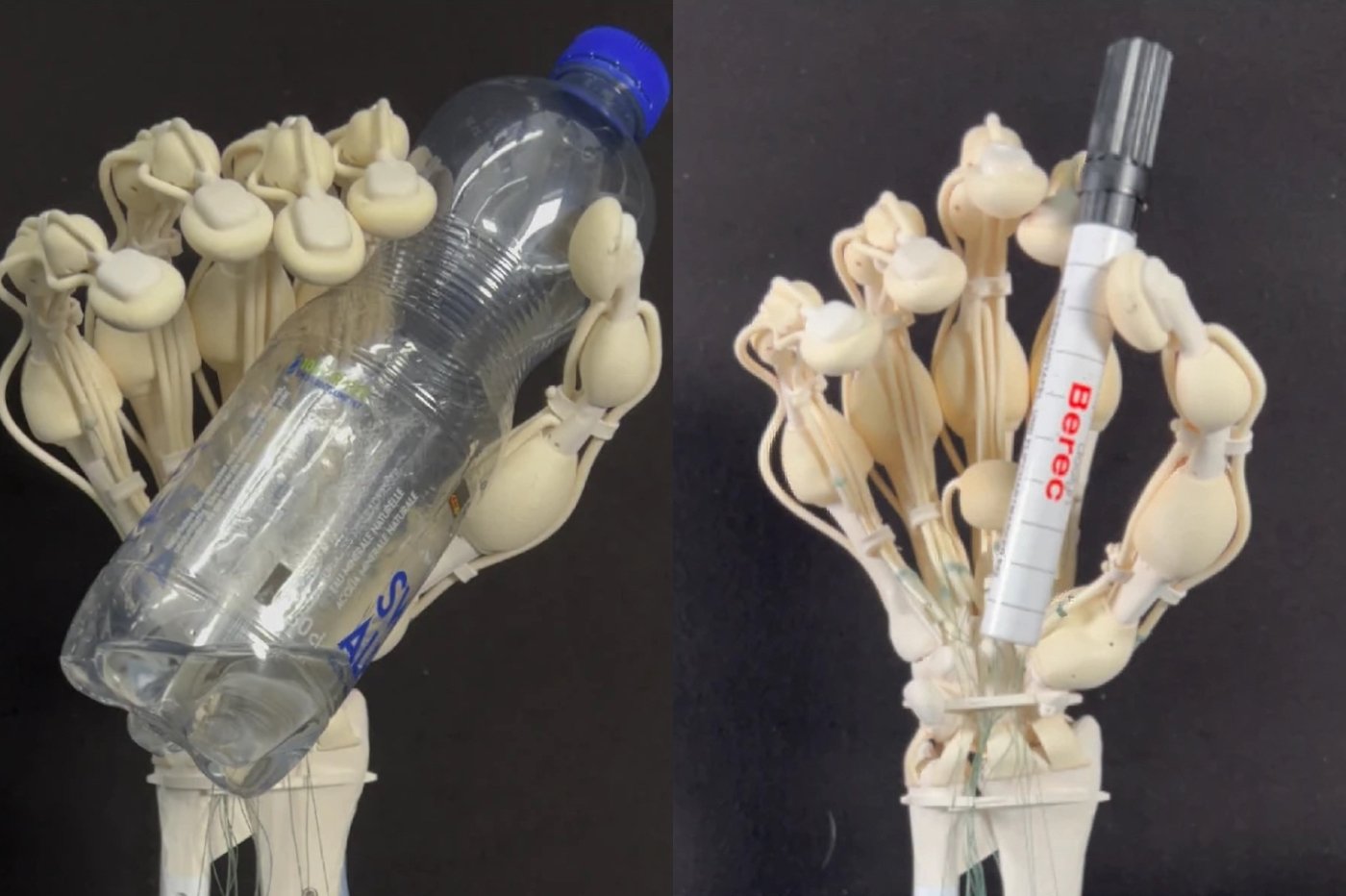
Cette contrainte pourrait bientôt être du passé. Une équipe de chercheurs de l’ETH Zurich, aidés par la startup américaine Inkbit, a développé la première main robotique au monde dotée d’une structure interne imitant les os, ligaments et tendons humains. Ce projet, réalisé grâce à une méthode d’impression 3D nommée « vision-controlled jetting » (VCJ), marque un tournant important dans la conception robotique.
Contrairement aux méthodes traditionnelles d’impression 3D, qui utilisent des polyacrylates à durcissement rapide, le processus VCJ emploie des polymères thiolène à durcissement lent. Ces derniers possèdent d’excellentes propriétés élastiques, ce qui leur permet de retrouver rapidement leur forme initiale après flexion. Le VCJ se distingue également par son système de contrôle en boucle fermée, qui permet d’imprimer la structure complète d’un robot en une seule fois, sans assemblage ni étapes de fabrication supplémentaires.
L’application de cette technologie ne se limite pas à la création de mains robotiques. Elle a également permis la fabrication d’un cœur robotique, d’un robot à six pattes, et d’un matériau capable d’absorber les vibrations environnantes. Ces développements démontrent le potentiel du VCJ à produire des systèmes robotiques hybrides qui combinent des matériaux souples et rigides pouvant surpasser les robots traditionnels en termes de flexibilité et résoudre les problèmes de conception et d’échelle rencontrés par les robots entièrement souples.
La méthode du VCJ autorise non seulement une plus grande flexibilité dans la conception robotique, mais elle ouvre également la voie à des applications allant des implants médicaux à la production industrielle. Selon Robert Katzschmann, le VCJ pourrait à terme remplacer toutes les méthodes d’impression par jet d’encre basées sur le contact, transformant ainsi en profondeur la production de pièces fonctionnelles dans de nombreux secteurs d’activité.
🟣 Pour ne manquer aucune news sur le Journal du Geek, abonnez-vous sur Google Actualités et sur notre WhatsApp. Et si vous nous adorez, on a une newsletter tous les matins.