Dans la nature, les bébés animaux ont tout intérêt à grandir vite, en particulier ceux qui sont éloignés du sommet de la chaîne alimentaire. Par exemple, si une petite girafe n’est pas capable d’apprendre à cavaler rapidement, elle a toutes les chances de finir en casse-croûte pour le premier prédateur venu ; la sélection naturelle les a donc poussées à apprendre à marcher en quelques heures à peine.
Certes, leurs mouvements sont encore loin d’être parfaits à ce stade ; ils sont patauds, mal coordonnés, mais cette adaptation leur permet d’augmenter considérablement leurs chances de passer le cap déterminant de la petite enfance. Rien à voir avec les bébés humains, qui restent extrêmement vulnérables pendant de longs mois.
Pour les chercheurs en robotique et en intelligence artificielle, il s’agit d’exemples très intéressants ; comprendre les tenants et les aboutissants de ces mécanismes pourrait leur permettre de développer des machines plus performantes et des systèmes d’entraînement très rapides.
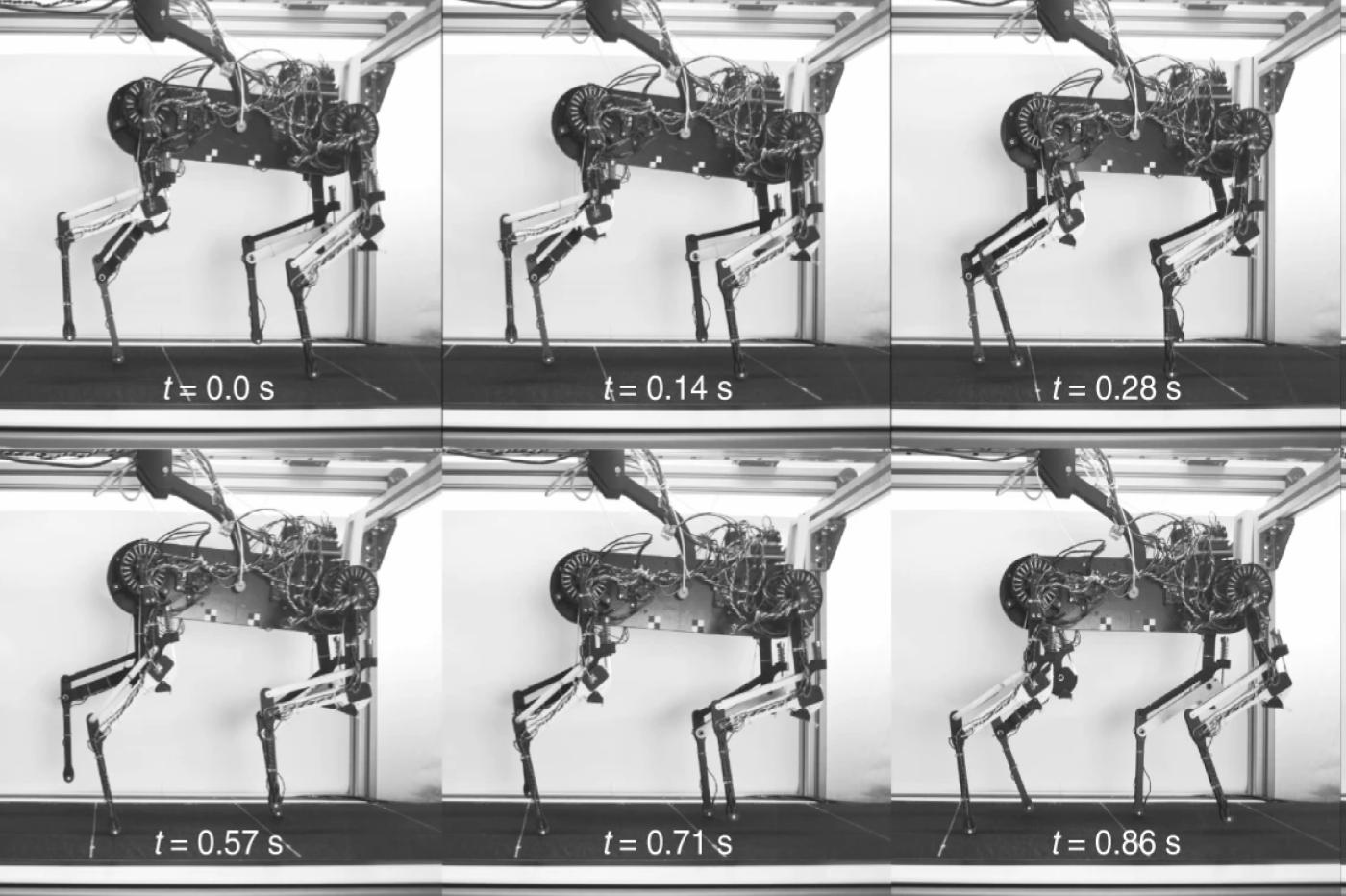
Les chercheurs du prestigieux Max Planck Institute, en Allemagne, se sont donc penchés sur la question. Ils ont construit un robot quadrupède qui ressemble vaguement au Spot de Boston Dynamics dans l’objectif de comprendre comment les animaux apprennent à marcher.
« Nous avons cherché des réponses en construisant un robot qui présente des réflexes, comme un animal, et qui apprend de ses erreurs », explique Felix Ruppert, l’un des chercheurs associés à ces travaux.
Une version robotique du pacemaker de l’organisme
Ce qui différencie ce robot, c’est que les chercheurs l’ont équipé d’un système qui, fonctionnellement parlant, joue le rôle de « moelle épinière virtuelle ». Chez les humains, cette structure qui occupe le canal de la colonne vertébrale contient un réseau de neurones très particuliers : les réseaux locomoteurs spinaux (ou CPG, pour central pattern generators).
C’est un enchevêtrement de cellules nerveuses unique en son genre qui peut fonctionner de façon parfaitement autonome. Pour résumer, c’est un peu le chef d’orchestre du système nerveux ; c’est lui qui donne la cadence à tout un tas de comportements qui reposent sur des comportements dits « rythmiques et stéréotypés ».
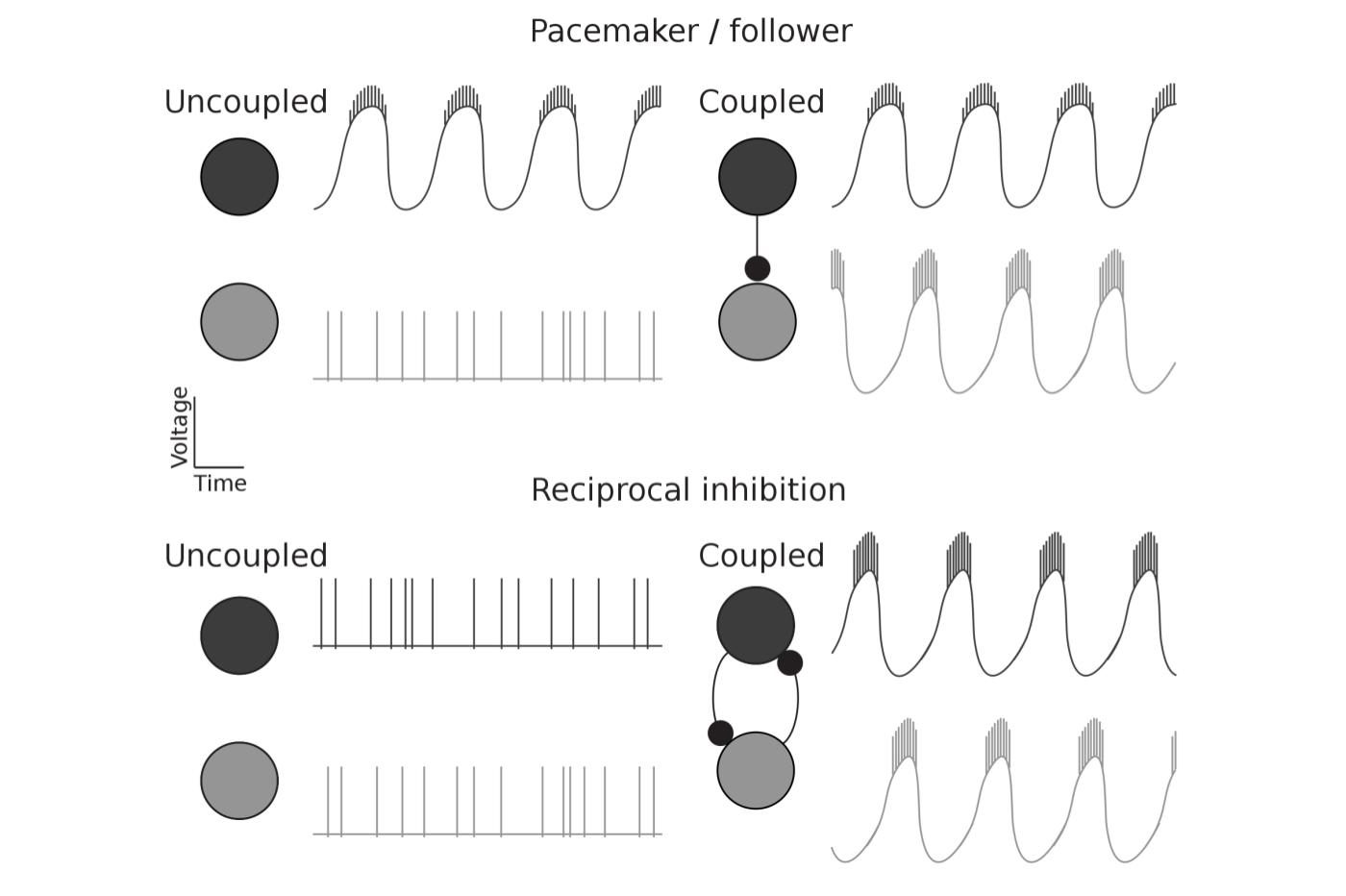
Ils sont capables d’agir indépendamment de tout autre influx nerveux ; par exemple, si vous êtes capable de respirer, de cligner des yeux ou de marcher sans y prêter la moindre attention, c’est grâce aux CPG.
Mais la donne change quand l’automatisme simple ne suffit plus, par exemple quand le terrain devient irrégulier. Là, le modèle proposé par les CPG ne suffit plus. Le reste de l’appareil locomoteur entre en jeu pour finir le travail grâce à différentes fonctions réflexes.
Toujours dans le cas de la marche, c’est grâce à ces réflexes que vous ne finissez pas nécessairement le nez sur le pavé à chaque faux pas ; le système nerveux va automatiquement jouer sur la contraction des muscles pour compenser le mouvement et maintenir la posture.
Chez les animaux, y compris l’Homme, le fait d’apprendre à marcher revient plus ou moins à « entraîner » ces CPG et ces réflexes en permanence ; les chercheurs les décrivent d’ailleurs comme une « intelligence automatique et intégrée de la marche ». Et c’est pour imiter cette architecture neurologique extrêmement flexible que les chercheurs ont choisi d’intégrer un CPG virtuel à leur robot.
Un robot qui gambade en une heure à peine
Un ensemble de capteurs situés dans ses pattes permet d’entraîner ce système en permanence. À chaque itération, l’algorithme compare la position réelle des membres au modèle proposé en temps réel par le CPG, puis calcule les mouvements complémentaires qui seraient nécessaires pour compenser la différence.
Le « mode d’emploi » proposé par le CPG s’affine donc au fil du temps, ce qui permet au robot d’être de plus en plus à l’aise lors de la marche. « Au début, quant l’ordinateur produit un signal qui contrôle les moteurs des jambes, le robot trébuche », expliquent les chercheurs.
« Les données voyagent entre le CPG virtuel et les capteurs des jambes et sont comparées en permanence. Si les données des capteurs ne correspondent pas à celles qui sont attendues, l’algorithme change certains paramètres jusqu’à ce que le robot cesse de trébucher, et ainsi de suite », précisent-ils.
Et cette approche a tellement bien fonctionné que Morti peut apprendre à marcher en une heure à peine, sans la moindre information préalable ! Un temps de passage sidérant, sachant qu’il se compte traditionnellement en jours ou en mois chez les autres robots de ce genre.

Quand les robots servent de modèle au vivant
Il s’agit déjà d’un gros avantage en soi, mais ce n’est pas le seul. Évolutivement parlant, l’un des intérêts des CPG, c’est qu’ils nous permettent de réaliser des actions relativement complexes sans devoir dépenser de l’énergie pour y penser activement. Et on retrouve aussi cet avantage dans cette approche cybernétique.
Là où les robots de ce genre consomment souvent des dizaines, voire des centaines de watts, Morti se contente d’un budget énergétique très raisonnable de 5 W. Sachant que l’autonomie constitue encore l’une des principales limites de ces engins, il s’agit d’un progrès absolument remarquable.
Le dernier avantage de cette approche, c’est qu’elle pourrait même profiter aux biologistes ! En effet, en règle générale, ce sont les roboticiens qui s’inspirent des animaux vivants pour optimiser leur machine. Mais ici, l’inverse est également possible. Ce robot pourrait fournir une plateforme de recherche très intéressante pour les chercheurs qui travaillent sur les subtilités du système nerveux.
« On ne peut pas étudier facilement la moelle spinale d’un animal vivant, mais on peut en modéliser un sur un robot », explique Alexander Badri-Spröwitz, chef du laboratoire et co-auteur de l’étude. « Nous savons que ces GPC existent chez de nombreux animaux. On sait aussi quels réflexes sont intégrés, mais on ne maîtrise pas bien les interactions entre les deux », précise-t-il.
« C’est de la recherche fondamentale à l’intersection de la robotique et de la biologie », s’enthousiasme-t-il en conclusion. « Ce modèle robotique nous propose des réponses que la biologie seule ne peut pas nous apporter ». La boucle est bouclée !
Le texte de l’étude est disponible ici.
🟣 Pour ne manquer aucune news sur le Journal du Geek, abonnez-vous sur Google Actualités et sur notre WhatsApp. Et si vous nous adorez, on a une newsletter tous les matins.