Si vous avez navigué sur Internet au cours de l’année passée, vous avez difficilement pu rater le lancement de Spot, le fameux robot quadrupède de Boston Dynamics, digne d’un épisode de Black Mirror. Pendant des mois, la toile a même été inondée de vidéos où on pouvait le voir escalader toutes sortes d’obstacles, porter des objets ou encore se faire allègrement maltraiter par un ingénieur qui testait sa stabilité à grands coups de botte.
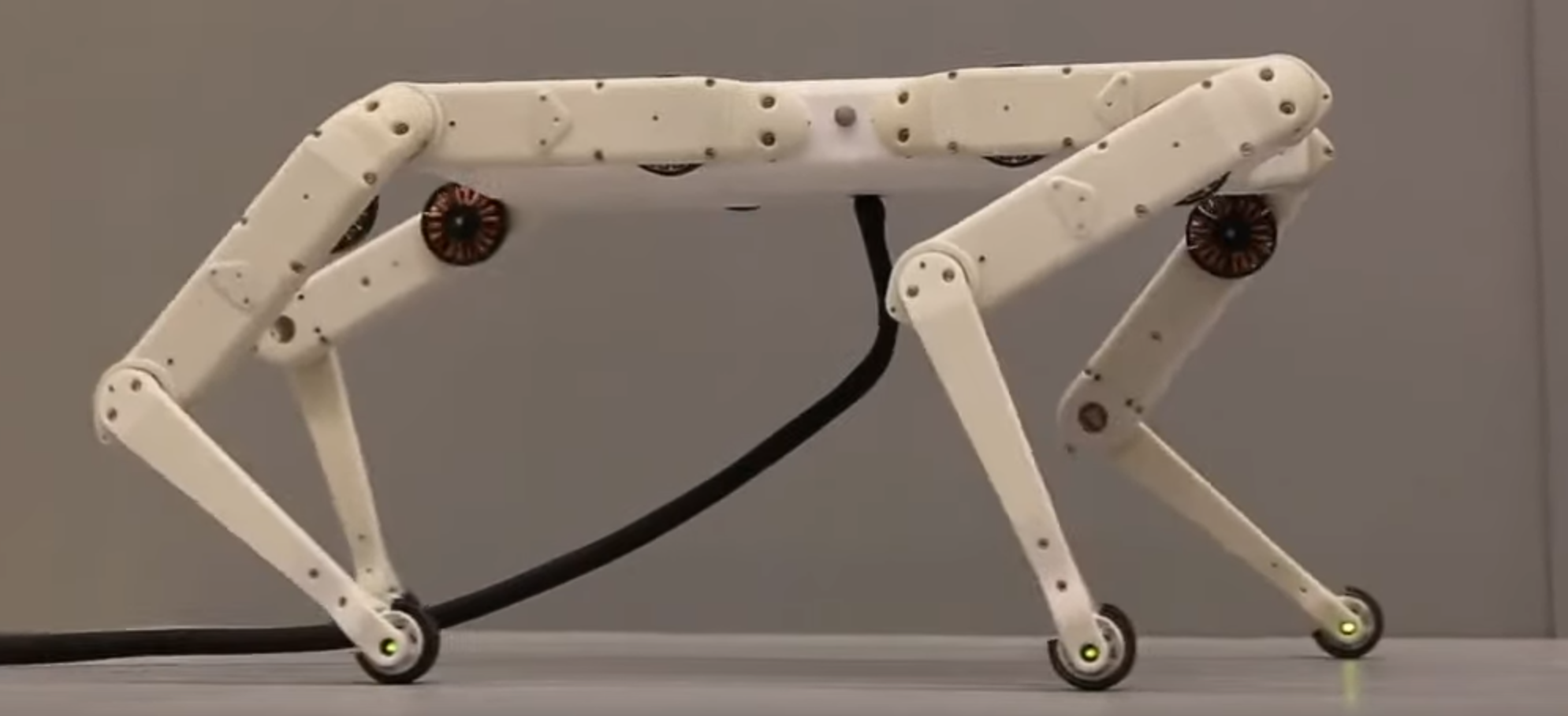
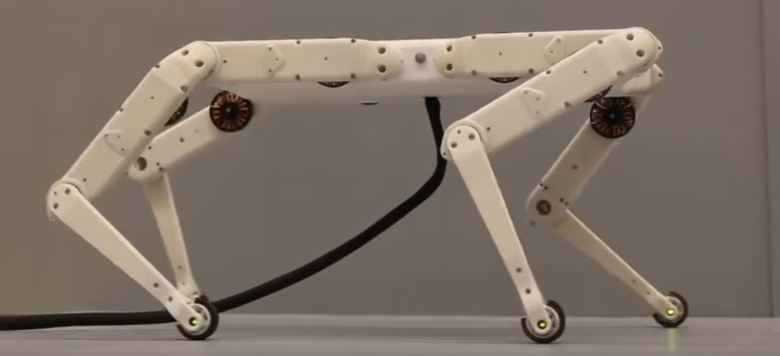
Sauf qu’à plus de 50.000 dollars par tête, Spot n’est pas exactement à la portée de toutes les bourses, loin de là. Un prix suffisant pour doucher les espoirs des passionnés de robotique qui espéraient pouvoir, un jour, faire mumuse avec une sorte de canidé robotisé. Mais c’était sans compter une équipe germano-américaine, de la NYU Tandon School of Enigeering et du célèbre Max Planck Institute for Intelligent Systems. Ces ingénieurs se sont attelés à la mise au point de Solo 8, une base de robot quadrupède inspiré du Spot, mais open-source à tous les étages. Tous les plans sont en effet disponibles en accès libre et les différentes pièces peuvent être imprimées en 3D. Cela permet à d’autres chercheurs, ingénieurs ou passionnés avec de solides compétences en robotique de construire sur ce socle pour l’adapter à ses envies.
Son prix (quelques milliers d’euros) reste inférieur d’un facteur 10 à celui de Spot, ce qui permet de le tester dans des situations délicates où la bête de Boston Dynamic n’oserait même pas poser un piston. Globalement, cela pourrait en faire un un superbe atout en recherche robotique. Un communiqué sur le site de la NYU donne les exemples de champs de recherche suivants :
- Exploration des mouvements des membres des animaux sur différentes surfaces
- Apprentissage et renforcement de comportements dynamiques et complexes, y compris les stress tests qui seraient trop risqués pour des plateformes plus chères
- Locomotion ultra-dynamique, façon parkour, que très peu de robots parviennent à pratiquer
- Manipulation de l’environnement (ouverture de portes, pression sur des boutons…)
- Intégration avec des technologies de communication avancées…
Un pas vers la robotique domestique grand-public
Du haut de ses deux kilogrammes, Solo 8 est spécialement conçu pour être facile d’utilisation. Par exemple, en cas de chute sur le dos, il est capable de retourner ses pattes (0:56 dans la vidéo de présentation) : son dos devient alors son ventre et vice-versa, et il peut donc repartir sans souci. Autre détail, les “suspensions” de Solo 8 ne comportent aucun ressort mécanique : l’amortissement est géré uniquement côté software. Les performances seront probablement moins bonnes, mais cela permet d’en ajuster la dureté en changeant une simple variable dans le programme, ce qui est beaucoup plus simple que de remplacer ou de reprogrammer une suspension complexe. Ce sont des petits détails comme ceux-ci qui permettent d’envisager une utilisation relativement facile, par exemple pour une start-up aux moyens limités qui souhaiterait développer son propre robot sur cette base libre.
Spot a prouvé la faisabilité de systèmes ultra-performants, faisant usage d’une technologie de pointe pour remplir des tâches plus ou moins complexes. Reste maintenant à démocratiser cette technologie, et cela passera immanquablement par deux étapes : une distribution plus large, et une baisse radicale des prix. S’il est très loin d’être aussi sophistiqué que le fleuron de Boston Dynamics, Solo 8 parvient en tout cas à cocher ces deux cases. Lentement mais sûrement, nous nous rapprochons certainement du moment où des petits robots comme celui-ci pourraient être utilisés pour remplir de nombreuses petites tâches du quotidien avec autonomie et flexibilité. Certes, sans tête, Solo 8 aura du mal à vous ramener votre journal ou vos pantoufles, mais on fait confiance à votre imagination pour explorer toutes les applications potentielles d’un petit robot open-source !
[amazon box=”B07DJXNPF7″]
🟣 Pour ne manquer aucune news sur le Journal du Geek, abonnez-vous sur Google Actualités et sur notre WhatsApp. Et si vous nous adorez, on a une newsletter tous les matins.










Sans tête et sans… cerveau également. La partie hardware de son système de commande est extérieure à son “corps”… Difficile d’aller faire joujou dehors avec cybertoutou 🙂
Effectivement, c’est comme le Boston Dynamics à ses débuts, puis il a intégré la tête et les batteries.